Удивительное занятие - моделирование. Только закончишь одну модель (или даже не закончишь ее), а уже хочется начать следующую, более сложную. К этому подзуживают и окружающие - в виртуальном смысле - моделисты, которые эту, новую, уже строят и даже почти закончили. Читаешь их переписку и зуд становится практически нестерпимым. Раньше я слышал о таком, но самонадеянно считал, что уж ко мне это точно не относится. Ага, как же…
На том модельном форуме, на котором я пасусь (rcgroups) есть совершенно замечательный немецкий товарищ Норберт по прозвищу kinderkram. В самый разгар (между)народного возмущения по поводу качества изготовления жужелиц тайваньской фирмой GAUI, он, вместо того, чтобы подпевать многоголосому и многоязычному хору недовольных, решил построить более сложную, но очень многообещающую модель по имени ArduCopter. Норберта не испугали ни сложность постройки, ни откровенная сырость проекта, авторы которого честно признавались, что проект совершенно не готов для широкой публики. Более того, он настолько вкусно рассказывал о процессе постройки, что соблазнил и меня, хотя мой GAUI летал и летает вполне пристойно. Но как можно было не увлечься, если новая жужелица столь многообещающа. Кроме гироскопов в ней предусмотрены: трехосевой акселерометр, позволяющий точно определить наклон модели относительно матушки-земли, компас и GPS, 10 раз в секунду дающие точную позицию и направление движения, а также датчик высоты. Чтобы обрабатывать все эти и другие данные, присутствуют целых два процессора - один занимается сигналами с радиопередатчика и моторами, а второй - переваривает информацию с датчиков и решает, что делать дальше.
Впрочем, это еще не все. Очень важным, по крайней мере для меня, преимуществом является доступность исходных текстов программ, что резко отличает ArduCopter от того же GAUI. Попросту говоря, если разработчики GAUI нахомутали, вам остается только вспоминать все благоприобретенные за долгую жизнь ругательства и ждать, пока эти же разработчики исправят свои ошибки. А в случае ArduCopter-а можно самому тряхнуть стариной, взяться за клавиатуру и решить проблему самостоятельно. Разумеется, правила хорошего тона при этом требуют поделиться своими находками с другими такими же сумасшедшими. А они, в свою очередь, будут делиться с вами. В итоге, единожды хорошо запущенный проект в дальнейшем может обходиться вообще без авторов, исключительно за счет сообщества тех, кто им пользуется. Такой подход к программированию известен уже давно и называется Open Source. В частности, именно так были разработаны операционная система Linux и еще много другого разумного, доброго и вечного программного обеспечения. Ваш покорный слуга и сам приложил скромные усилия к “революции Open Source” и с тех пор навсегда остался убежденным сторонником данной методы.
Ну и как я мог после всего этого пропустить мимо ушей рассказы Норберта? Правильно, никак не мог. И не пропустил. Мое тогдашнее (август месяц) состояние ума можно смело назвать помутнением. Я не обижусь, потому что на правду не обижаются. Ну а как еще это назвать, если до тех пор я только собирал модели из готовых купленных наборов, а тут такого набора в принципе не было? Детали надо заказывать в разных местах по всей нашей планете (США, Канада, Гонконг, Польша), ждать пока они придут, потом браться за паяльник, отвертку и другие инструменты, додумывая и доделывая недостающее по ходу. Вот, в качестве примера, основной блок управления:
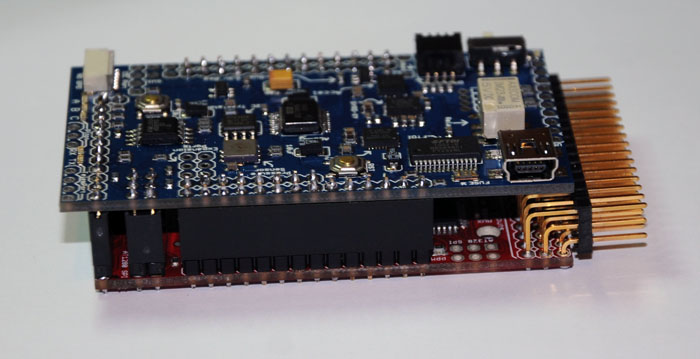
Это две платы, соединенные разъемами. Платы, к счастью, можно купить готовые, а вот разъемы придется паять.
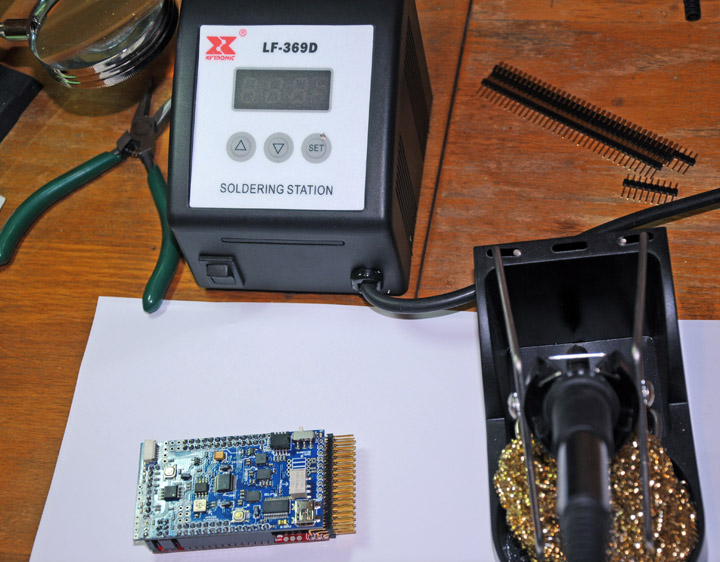
Конечно, для опытного электронщика это детские игры или, вернее, скука несусветная. А для меня это было определенное испытание, все-таки за паяльник я не брался очень давно. Зато мало что сравнится с удовлетворением от то, что могу и это. И не так уж плохо, по крайней мере, пока держится 😉.
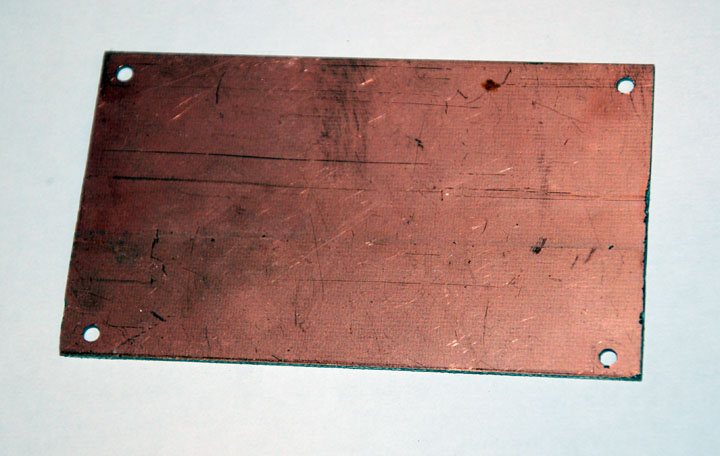
Другая сложность была связана с рамой, вернее, той ее частью, к которой крепится вся электроника. Готовых нет, разумеется. Пришлось бродить с видом лунатика по супермаркетам в поисках легкой, но прочной пластиковой коробочки, а потом собирать “этажерку” из геттинакса. Вот как выглядела одна из заготовок с уже просверленными отверстиями:
А вот уже полуфабрикат с законченной силовой разводкой:
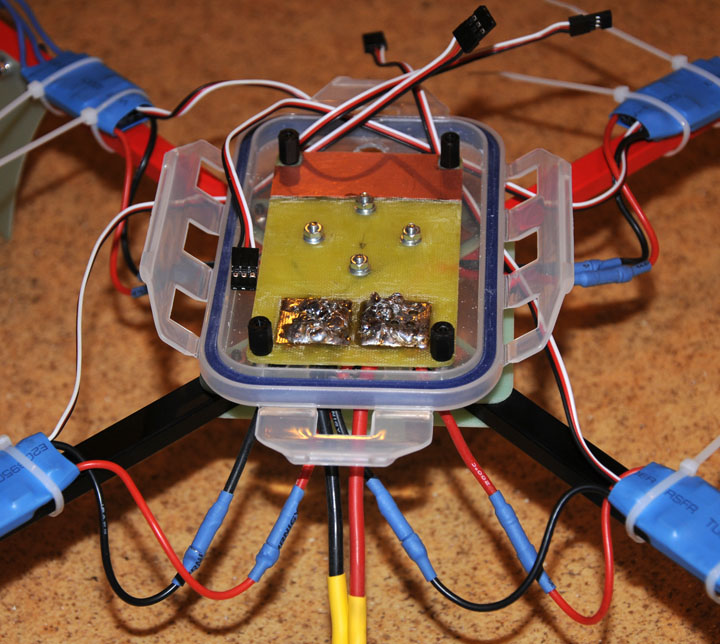
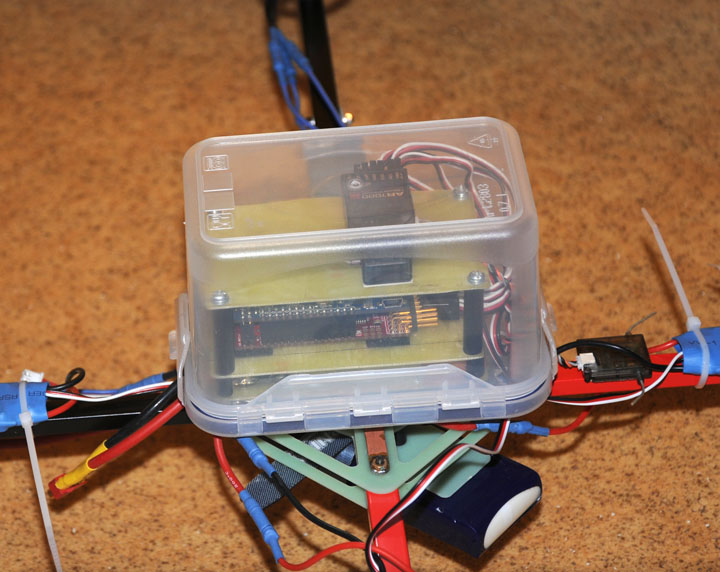
Ну и финальный (почти) вид всей этажерки в коробочке:
Неудивительно, что сборка, наладка и испытание коптера заняли много времени. Зато сколько удовольствия я получил в процессе! Маринка даже подшучивала, что меня, как в бородатом анекдоте, интересует не столько результат, сколько сам процесс. Как ни странно, результат тоже был достигнут. Вот он:

Итак, как принято говорить в научно-популярной литературе, в начале октября состоялись летные испытания новой жужелицы. В лучших традициях, первые полеты были недолгими и, можно сказать, в лабораторной обстановке:
Потом была и куча возни с настройками, и переделки, и улучшения и проверки на открытом воздухе… Многое не доделано до сих пор, как в самом проекте ArduCopter, так и у меня. Но я уже рискнул полетать под запись - и вот, что из этого вышло:
Так что определенный этап, можно считать, уже позади 😄.
А в заключение очень хочется сказать огромное спасибо: команде проекта ArduCopter, Норберту, а также всей дружной тусовке на rcgroups, причем это не формальность из разряда заученных в детстве, а от чистой души. Ребята, я получил море удовольствия общаясь с вами и работая вместе!